【电控笔记6.4】pid控制器设计
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.mfbz.cn/a/772939.html
如若内容造成侵权/违法违规/事实不符,请联系我们进行投诉反馈qq邮箱809451989@qq.com,一经查实,立即删除!相关文章
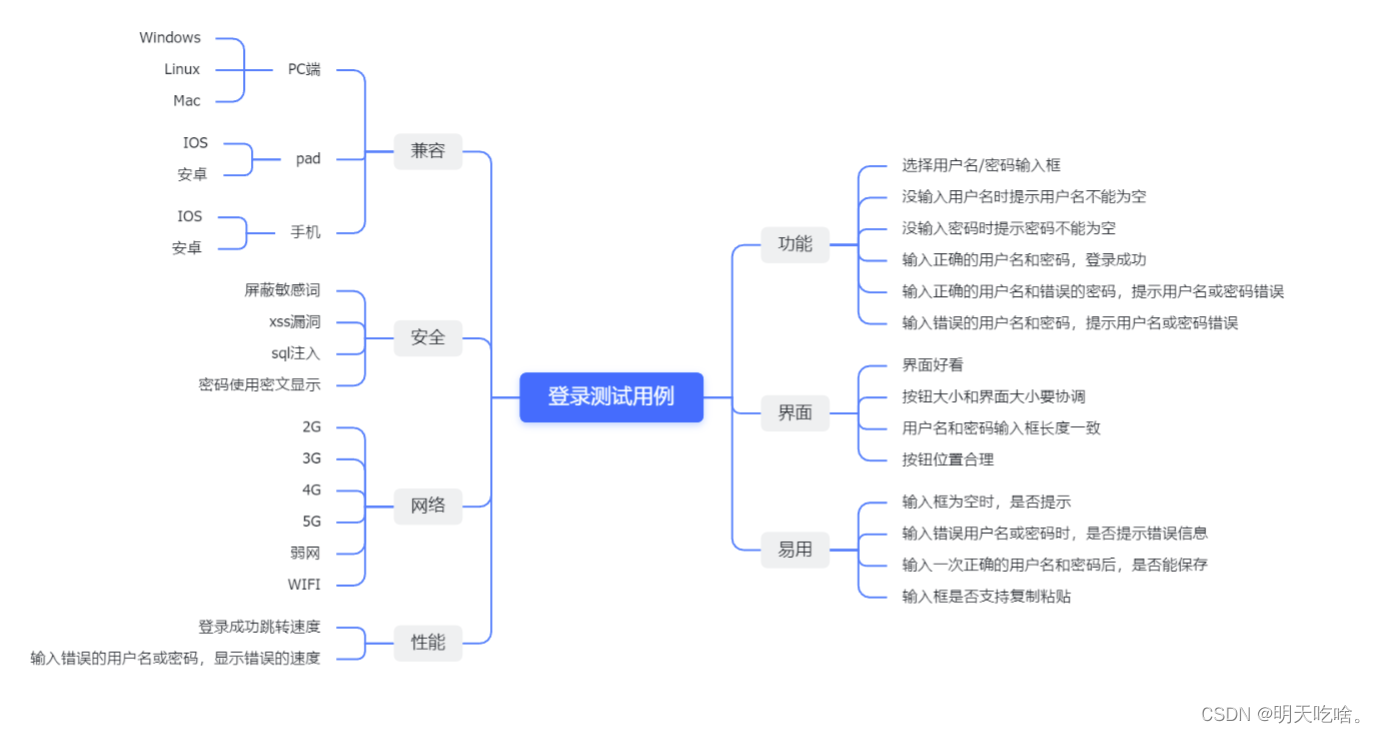
【软件测试】之黑盒测试用例的设计
🏀🏀🏀来都来了,不妨点个关注! 🎧🎧🎧博客主页:欢迎各位大佬! 文章目录 1.测试用例的概念2.测试用例的好处3. 黑盒测试用例的设计3.1 黑盒测试的概念3.2 基于需求进行测…

暗潮短视频:成都柏煜文化传媒有限公司
暗潮短视频:涌动的新媒体力量
在数字化时代的浪潮中,短视频以其独特的魅力和无限的潜力,迅速成为新媒体领域的一股强大力量。而在这片繁荣的短视频领域中,成都柏煜文化传媒有限公司“暗潮短视频”以其独特的定位和深邃的内容&…

论文浅尝 | 从最少到最多的提示可在大型语言模型中实现复杂的推理
笔记整理:王泽元,浙江大学博士 链接:https://openreview.net/forum?idWZH7099tgfM 1. 动机 尽管深度学习已经取得了巨大的成功,但它与人类智慧仍然存在一些明显差距。这些差距包括以下几个方面:1)学习新任…

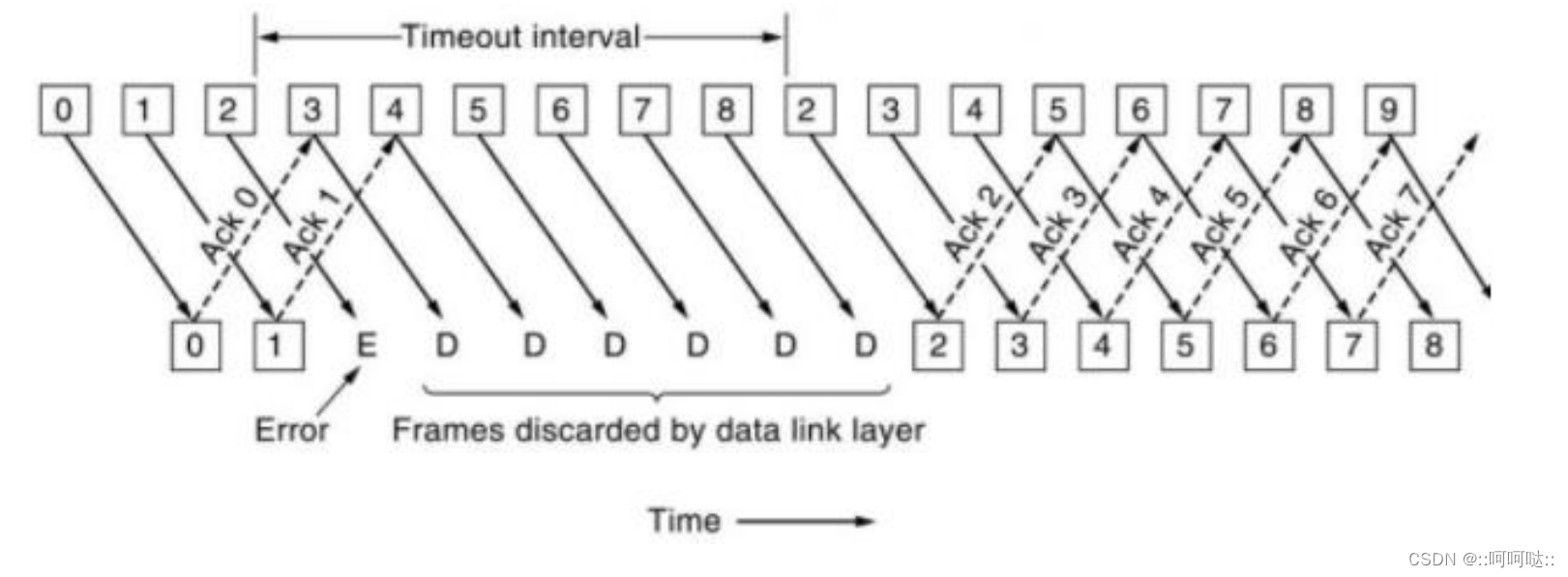
11 UDP的可靠传输协议QUIC
1.如何做到可靠性传输 2.UDP与TCP,我们如何选择 3.UDP如何可靠,KCP协议在哪些方面有优势 4.KCP协议精讲(重点讲解 5.OUIC时代是否已经到来
UDP如何做到可靠传输 ACK机制重传机制 重传策略序号机制(后发的包可能先到) 3 2 1-> 2 3 1重排机制 2 3 1-> 3 2 1窗口机制 流…

谷粒商城笔记-03-分布式基础概念
文章目录 一,微服务二,集群、分布式三,远程调用四,负载均衡五,服务注册、服务发现、注册中心六,配置中心七,服务熔断、服务降级1,服务熔断2,服务降级3,区别 八…

Spring框架的学习前言
1.注意事项
1.在接下来的学习中我们会将jdk的版本升级到17。
2.引入maven仓库用来存储依赖
3.在后面的javaSpring框架中要第一个项目的创建要选javaweb和lombook这两个依赖
2.Maven的主要功能
(1)maven的主要功能是引入依赖和管理依赖,在…

基于SpringCloud的分布式架构网上商城
基于SpringCloud的分布式架构网上商城的主要使用者管理员功能:首页、个人中心、用户管理、商品信息管理、商品分类管理、系统管理、订单管理等功能。 💕💕作者:Weirdo 💕💕个人简介:擅长Java、C…

【SkiaSharp绘图15】SKPath属性详解:边界、填充、凹凸、类型判断、坐标、路径类型
文章目录 SKPath 构造函数SKPath 属性Bounds 边界(宽边界)TightBounds紧边界FillType填充方式IsConcave 是否凹/ IsConvex 是否凸IsEmpty是否为空IsLine是否为线段IsRect是否为矩形IsOval是否为椭圆或圆IsRoundRect是否为圆角矩形Item[] 获取路径的坐标LastPoint最后点的坐标Po…
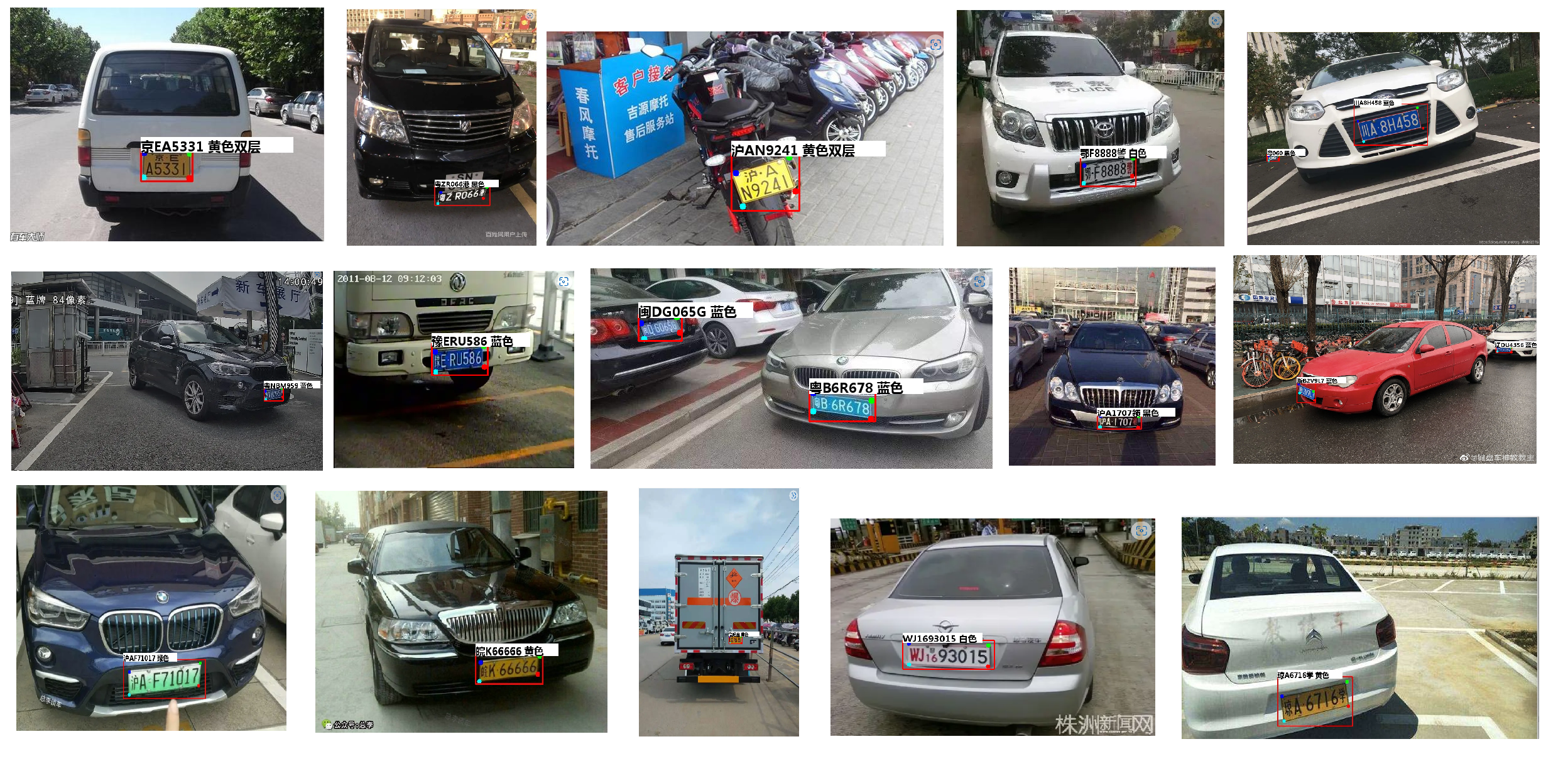
基于香橙派AIpro搭建的车牌识别系统
引言
本人正有学习嵌入式的想法,正好碰到机会让我搞了块OrangePi AIpro(香橙派AIpro)开发板,正合我意,直接上手进行体验,顺便给大家分享下我的实践过程。
开发板介绍与初次启动
OrangePiAIPro开发板是香…

WPF UI InkCanvas 导师演示画板 演示 笔记 画笔 识别
<Grid><InkCanvas Name"inkCanvas"/><Button Content"识别" Click"Button_Click" VerticalAlignment"Bottom"/></Grid> 引用内库 Ink ink new Ink();
private void Button_Click(object sender, RoutedEvent…
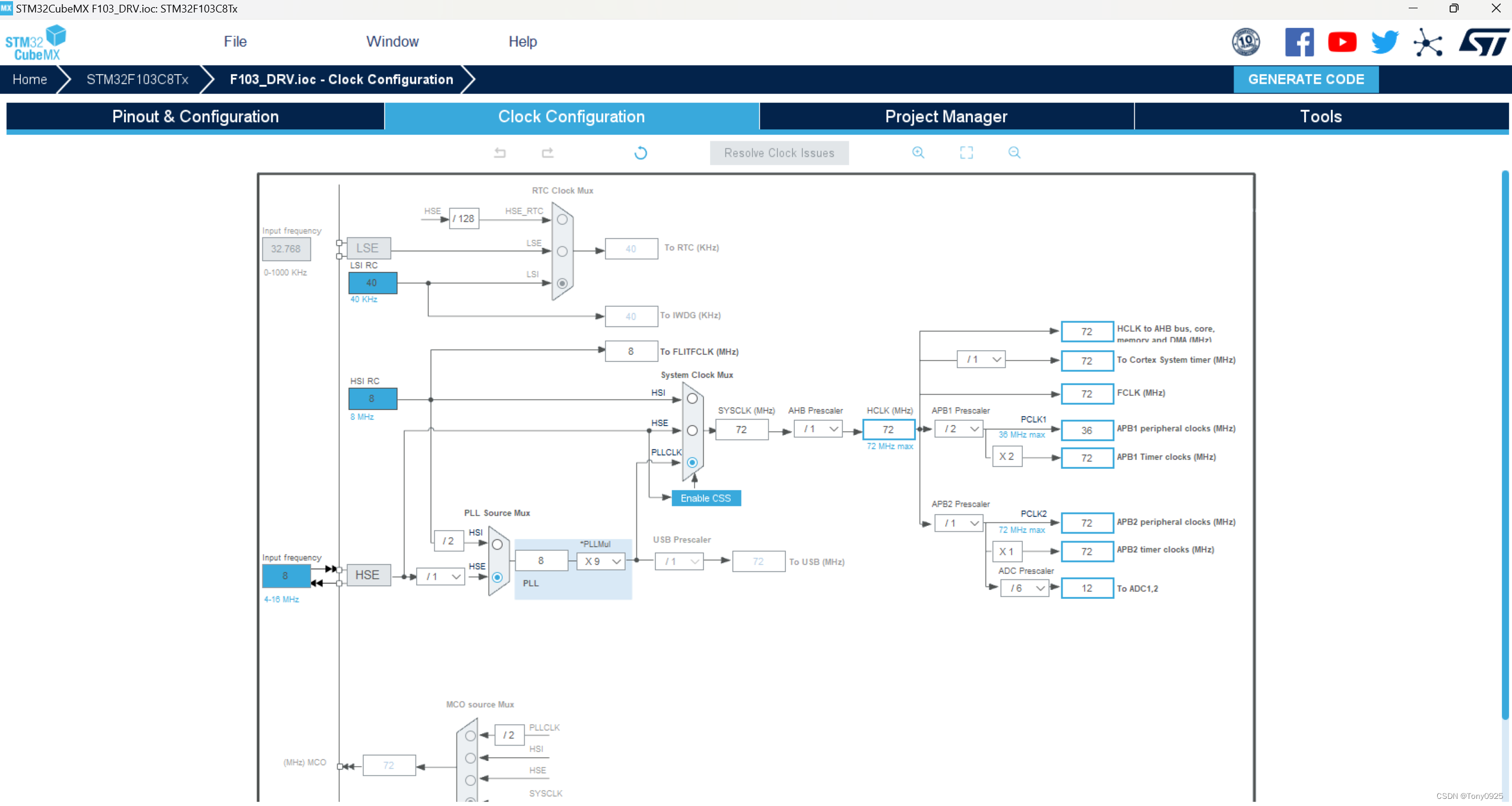
基于STM32F103C8T6的同步电机驱动-CubeMX配置与IQmath调用
基于STM32F103C8T6的同步电机驱动-CubeMX配置与IQmath调用
一、功能描述:
上位机通过CAN总线实现对电机的运动控制,主要包含三种模式:位置模式、速度模式以及力矩模式。驱动器硬件核心为STM32F103C8T6,带相电压采集电路以及母线电压采集电路。其中供电电压12V。 PWM中心对…
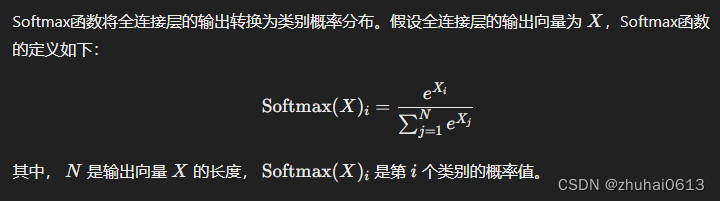
Android-卷积神经网络(Convolutional Neural Network, CNN)
一个复杂且在Android开发中常见的算法是图像处理中的卷积神经网络(Convolutional Neural Network, CNN)。CNN被广泛用于图像识别、物体检测和图像分割等任务,其复杂性在于需要处理大量的图像数据、复杂的神经网络结构和高效的计算。
1. 卷积操作(Convolution) 数学原理:…

企业级监控系统Zabbix
文章目录 Zabbix介绍Zabbix架构Zabbix serverZabbix agentZabbix proxy Zabbix Server的安装Zabbix Agent的安装监控主机流程zabbix_get自定义模板和监控项实战用户登录数监控1.指定监控项命令2.重启Agent服务3.在Server上创建监控项4.测试监控项5.查看监控项图形 触发器定义触…


STM32学习历程(day2)
GPIO解释
GPIO(General-purpose input/output)
可以配置为八种输入输出模式
引脚电平 0V-3.3V 部分引脚可容忍5v
输出模式可控制端口输出高低电平 用以驱动LED、控制蜂鸣器、模拟通信协议输出时序
输入模式可读取端口的高低电平或电压,用于读取按键输入、外界…
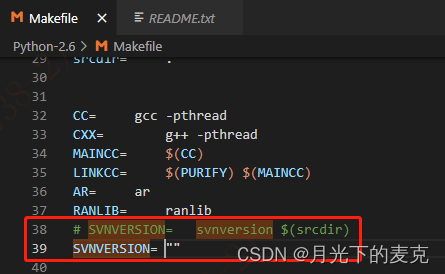
firefly rk3588 sdk安装问题记录
目录
一、python版本不对 1.1 下载python2.6
1.2 安装python2.6
1.3 安装遇到问题
二、安装hashlib
三、更新3588 SDK代码 一、python版本不对 我的环境的python版本是python3.7。初次安装的时候执行命令报错,说是版本不对导致
fuhdell:rk3588_sdk$ .repo/rep…

centos通过官网下载安装最新版mysql方案
官网下载步骤: 点击DOCUMENTATION mysql的yum仓库Using the MySQL Yum Repository 向下翻,查看安装命令 点击下载mysql安装包 下载对应的版本 不注册,直接下载社区版 下载好的安装包
安装步骤: 把rpm包导入到服务器…
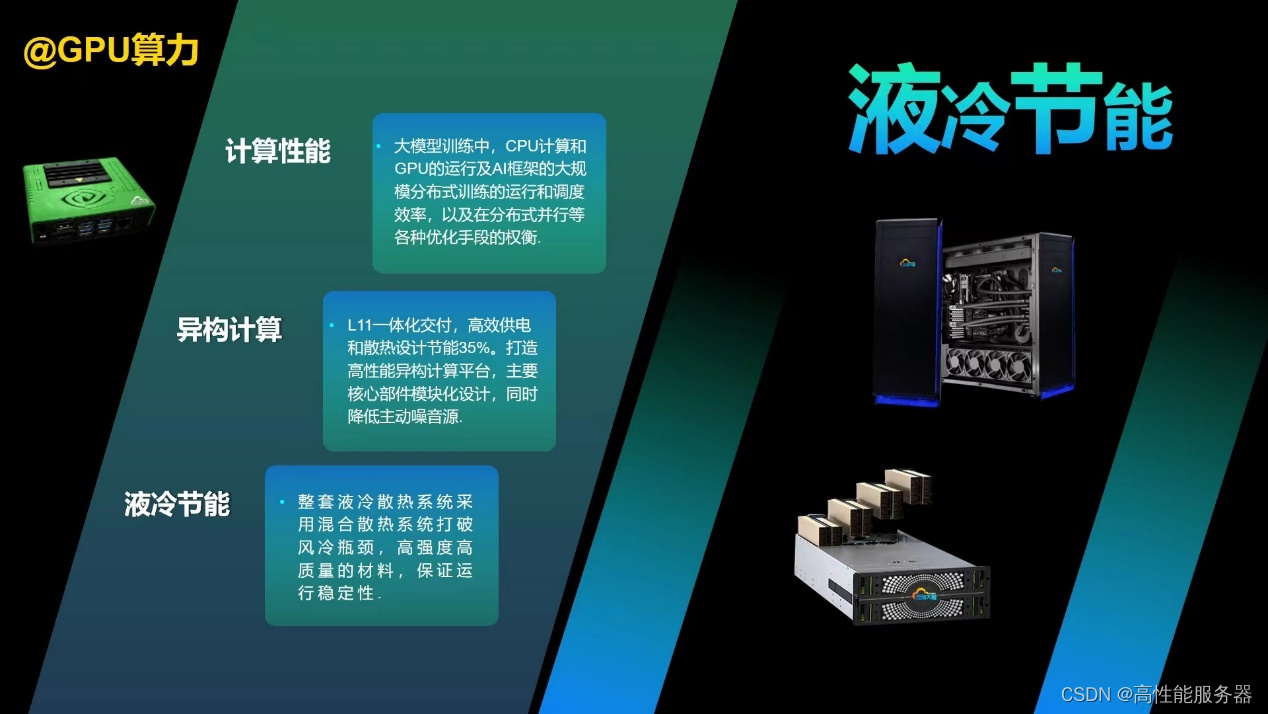
AI 驱动的数据中心变革与前景
文章主要探讨了AI计算时代数据中心的转型,涉及计算技术的多样性、规格尺寸和加速器的发展、大型语言模型(LLM)的发展、功耗和冷却趋势、基准测试的重要性以及数据中心的发展等方面。为大家提供深入了解AI基础设施发展的视角。 计算技术的多样…
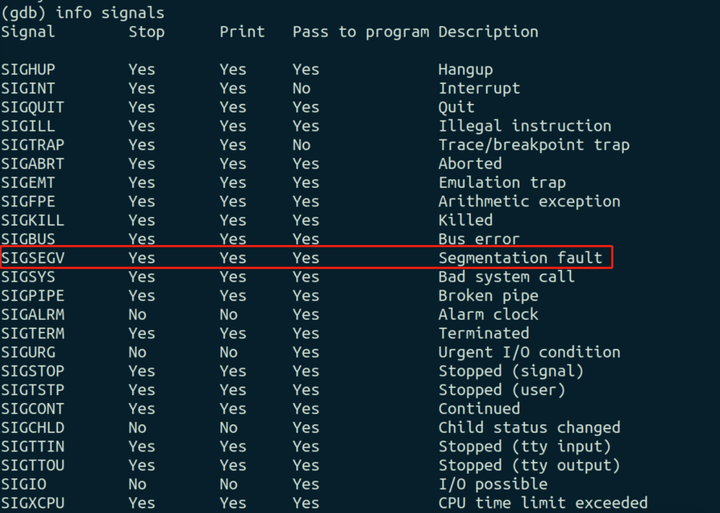
浅谈 Linux 中的 core dump 分析方法
在 Linux 系统开发领域中,core dump(核心转储)是一个不可或缺的工具,它为我们提供了在程序崩溃时分析程序状态的重要线索。当程序因为某种原因(如段错误、非法指令等)异常终止时,Linux 系统会尝…
最新文章
- unreal engine5制作动作类游戏时,我们使用刀剑等武器攻击怪物或敌方单位时,发现攻击特效、伤害等没有触发
- 分析总结Python使用列表、元组、字典的场景
- (17)MATLAB使用伽马(gamma)分布生成Nakagami-m分布的方法1
- 51单片机系列-按键检测原理
- 一款基于.NET开发的简易高效的文件转换器
- 知识图谱入门——10:使用 spaCy 进行命名实体识别(NER)的进阶应用:基于词袋的实体识别与知识抽取
- fl studio21.2.3.4004中文版永久2024最新下载安装图文详细使用教程
- Inf-DiT:Upsampling Any-Resolution Image、Vidu、MVDiff、Trio-ViT
- 审计报告是什么
- # Sharding-JDBC从入门到精通(8)- 综合案例(一)数据库设计搭建与分片策略配置
- # 梯影传媒T6投影仪刷机方法及一些刷机工具链接
- #01【面试问题整理】嵌入式软件工程师